Don's Tech Stuff
Don's Tech Stuff
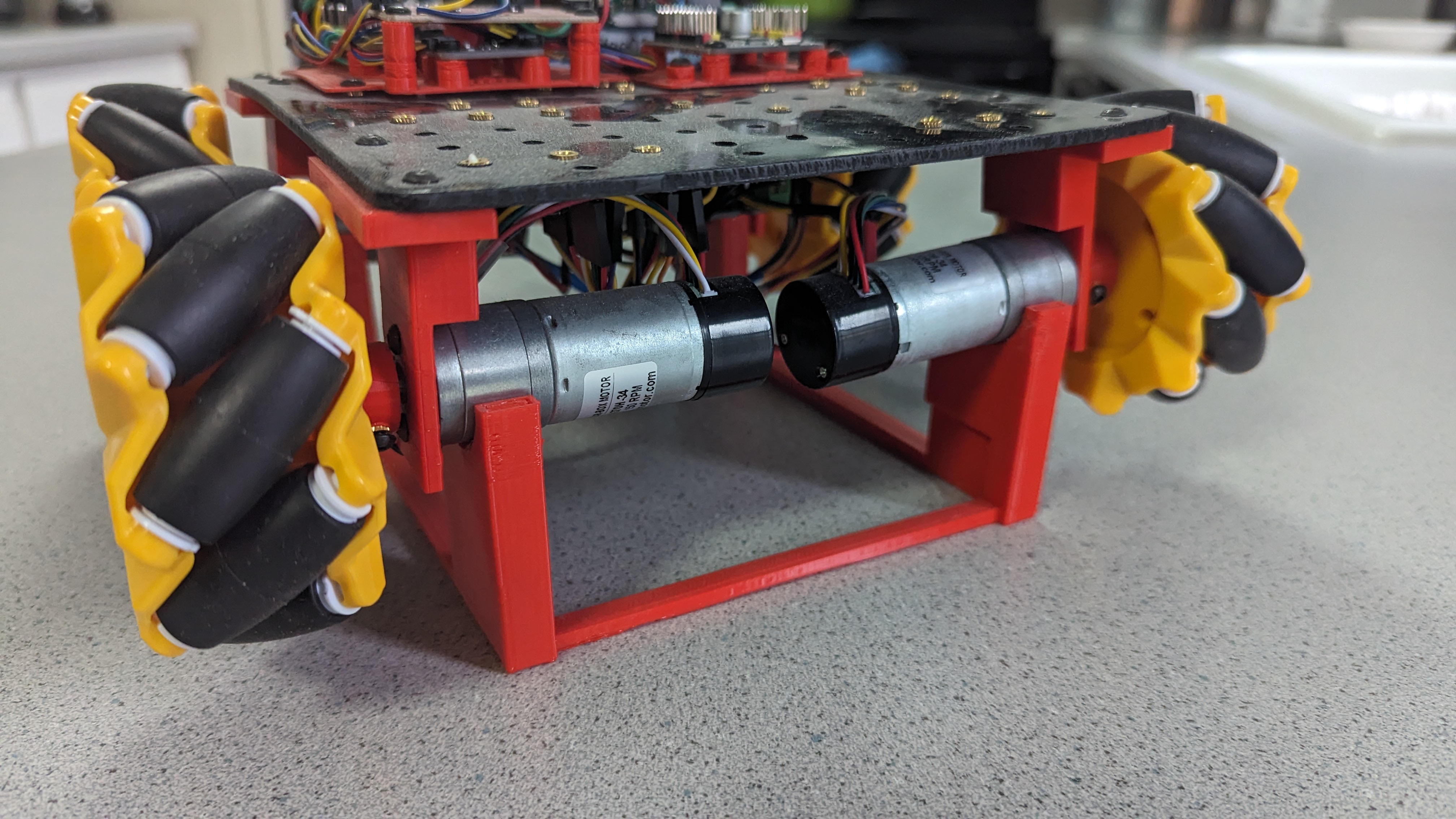
Robot Debugging Stands
Robots tend to want to move when doing software development. Sometimes unexpectedly. Or sometimes in the wrong direction or way too fast. If they are sitting on your desk or workbench this will quite likely be problematic. And often hazardous to the health of your robot...
Its pretty easy to make custom debugging stands for your robots, and they can save a lot of heartache...
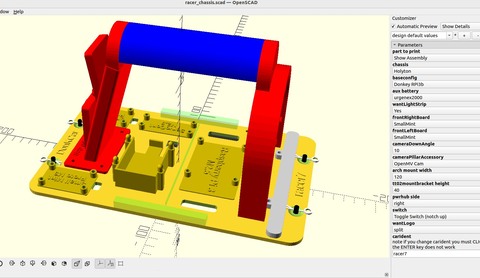
DonKCar Autonomous Racer
DonKCar is an autonomous racer, built upon commercial RC car chassis. This project includes an OpenSCAD tool that allows you to design custom upper plates to fit upon common chassis, utilizing Raspberry Pi, Jetson Nano, or Arduino shield based controllers and either OpenMV or RPi flavored cameras.
This is a project that is still under development, but you can follow it here, and perhaps find some useful bits even though it isn't fully complete. .
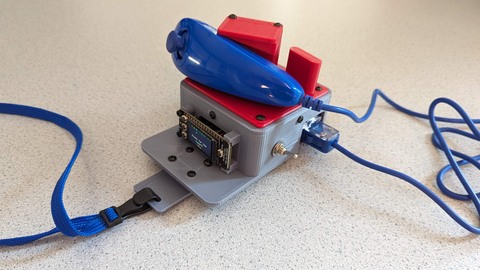
Remote Control for Robots
This is a remote controller for robots or autonomous racers. It uses ESP-NOW protocol to communicate with good range, and allows bidirectional communication with the robot so that it can display information from the robot on its TFT display as well as provide control signals.
The implementation described here is part of the DonKCar project but the communication and messaging protocol is simple and well-defined and could be easily used in any project that includes an ESP32-family processor in the device that is to be controlled.

Lane Following Camera Calculator
Your lane-following autonomous racer has a camera that looks ahead to find its path. This tool calculates the ideal "downangle" for your camera to ensure it centers its view at your desired distance.

Mecanum Wheel Adaptor
Your robot can use Mecanum wheels from DFR if you print and use these shaft adaptors. Use this OpenSCAD tool to generate 3d-printable adaptors to use these wheels with 4mm, 5mm, or 6mm shafts.
Maker concretedog also has designed a 3D printable adaptor for N20 motor to small meccanum wheels for use in his StoRPer project, but which is usable anywhere you want to use a meccanum on an N20 motor

12mm Hex Nut Wheel Adaptor
Your robot can use readily available RC car/truck wheels in a variety of styles/sizes. Most of them use standard 12mm hex nut hubs for attachment. Use this OpenSCAD tool to generate 3d-printable adaptors to use these wheels with 4mm, 5mm, 6mm, or TT motors.

MQTT Stopwatch / Display
Build a large-ish display with a network-controlled stopwatch and fields for displaying text messages relevant to your project.
This works great for competitive races and similar events.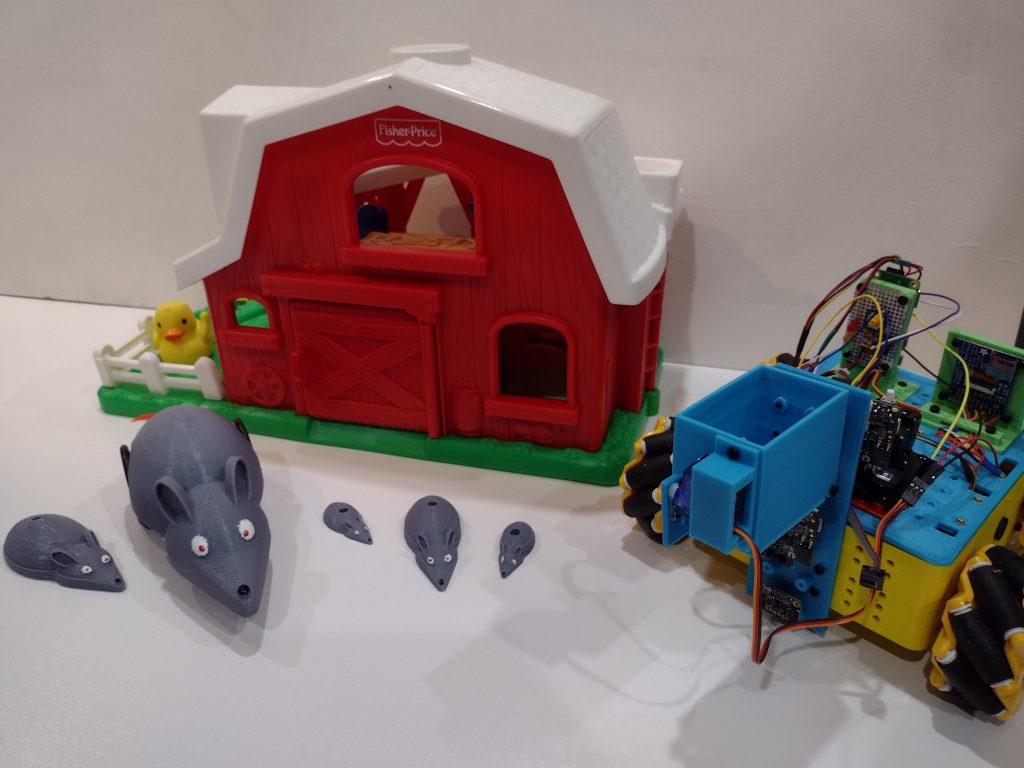
PiWars 2022
Pi Wars is a non-destructive Raspberry Pi-based robotics competition with both autonomous and remote-controlled challenges. It takes place over one weekend and features teams of school students, family members and hobbyists as well as solo roboteers.
Team Barn Rats entered the 2022 competition and placed 3rd in the Beginner category. We learned a lot and totally enjoyed it. We submitted in the Nature's Bounty and Hungry Cattle challenges.

Temperature/Humidity Logger
This temperature/humidity logger can be placed in household rooms, and sends data to AdafruitIO via Wifi. The data can be displayed and downloaded from the AdafruitIO Dashboard. It is implemented with Adafruit ItsyBitsy M4 and Adafruit Airlift boards, and an I2C based temperature/humidity sensor.
I have several in my house and its really interesting to see how the furnace's work distributes itself around the various rooms

Hand Sanitizer Dispenser
Hand Sanitizer (or soap) dispenser uses peristaltic pump to dispense fluid when Adafruit VCNL Optical Proximity Sensor observes hand under dispensing tube. Code runs on an Adafruit ItsyBitsy 32u4 5v version (which may be powered by 12v Vbat) and is coded in Arduino IDE. This is all packaged in a 3d printed container, and uses a standard Jelly Jar to hold the fluid.
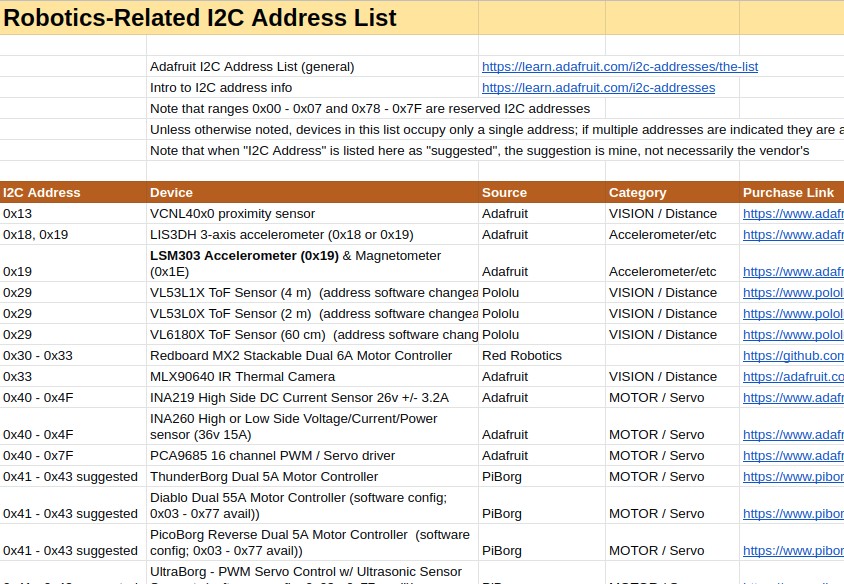
I2C Addresses for Robots
This is a short list of I2C addresses for boards / sensors / drivers that are commonly used in robotics projects. It includes devices from Adafruit, Pololu, Sparkfun, Red Robotics, PiBorg, DF Robots, and others.
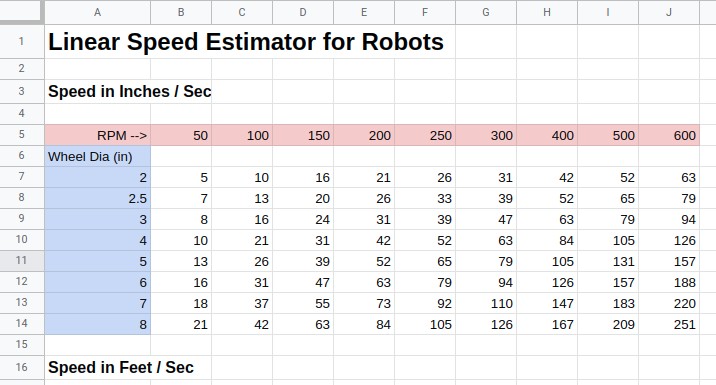
Speed Estimator for Robots
This spreadsheet shows estimated forward speed for robots based on wheel diameter and motor speed in RPM (metric and imperial units)
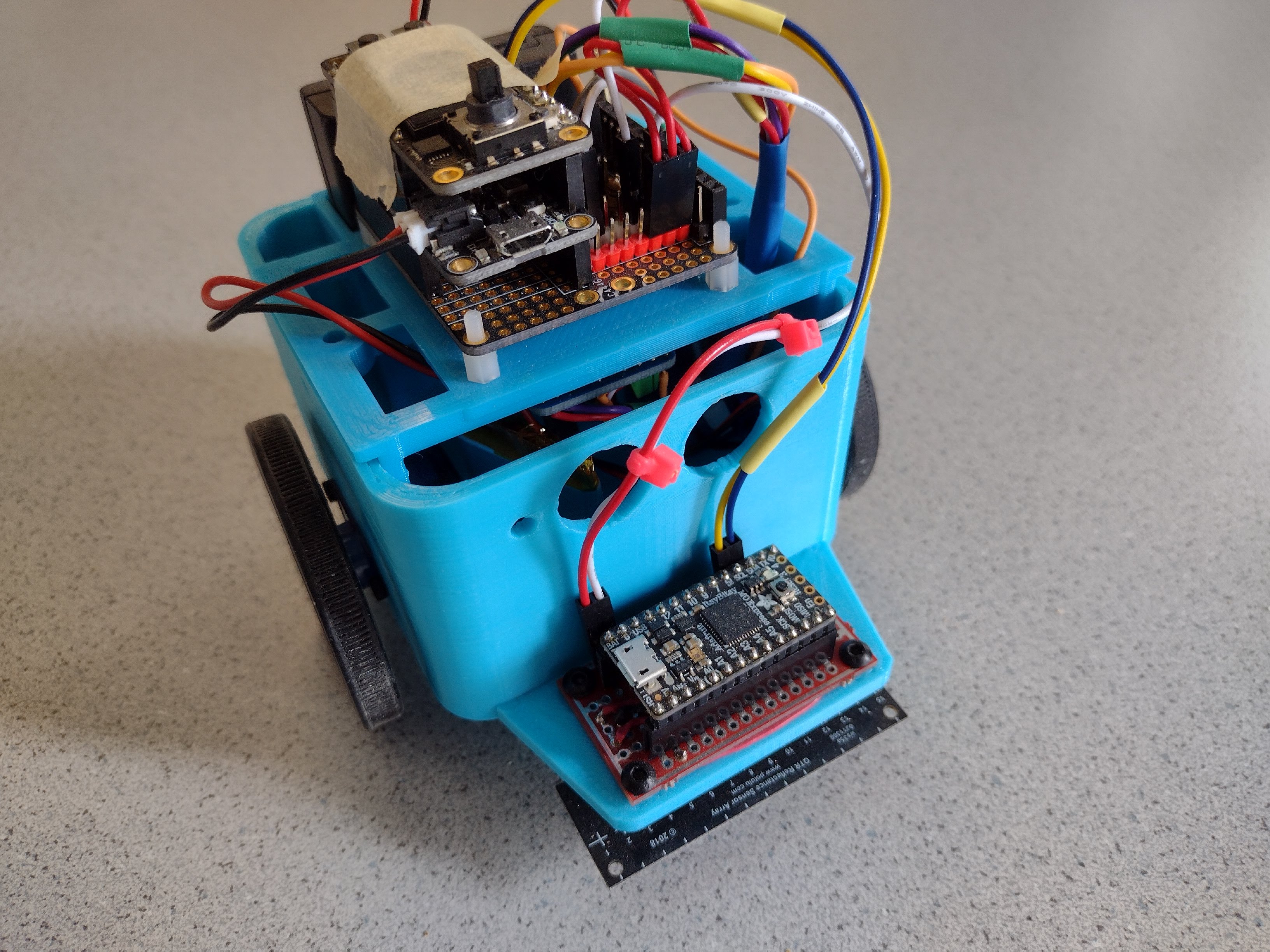
Robot Linefollower Sensor
The described line-follower sensor "interface controller" provides an i2c communications path to a Pololu QTR-MD-08RC reflectance sensor array. This is used as the sensor for a simple line-following robot. The sensor interface can be used as a separate piece on any robot that is capable of talking to i2c